Aubo机械臂位姿描述方式
| 修订日期 | 修订版本 | 修订内容 | 修订人 |
|---|---|---|---|
| 2022.09.29 | V0.1 | 初始化文档 | 袁紫衣 |
| 2023.04.06 | V0.2 | 补充问答 2 | 袁紫衣 |
| 2026.02.09 | V0.3 | 补充修正描述内容 | 袁紫衣 |
1 Aubo示教器界面位姿描述
Aubo示教器界面采用 XYZ_RPY欧拉角来描述刚体位姿,其中位置(XYZ)没有什么难以理解的地方,姿态(RPY)的定义如下:
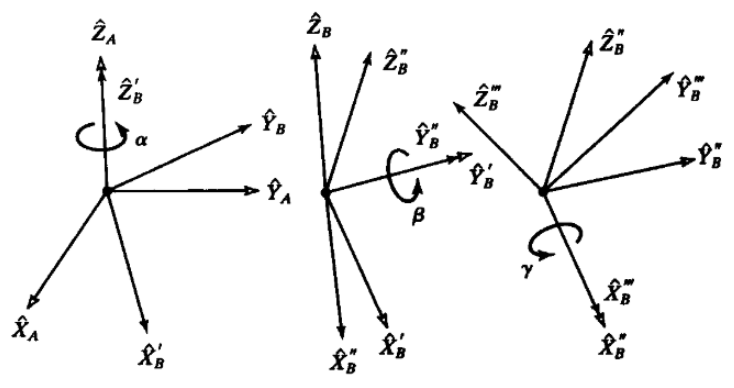
- 转动坐标轴的顺序为:X->Y->Z, 以固定坐标系的姿态作为参考(固定模式),即先绕固定坐标系X轴旋转$\gamma$,再绕固定坐标系Y轴旋转$\beta$,再绕固定坐标系Z轴旋转$\alpha$,如下图所示。(需要注意与浮动模式的区别)
- 以右手法则为准,拇指指向为轴正方向,四指转向为角度正方向。
计算公式如下: 固定模式在数学表达式上表现为旋转矩阵左乘,浮动模式在数学表达式上表现为旋转矩阵右乘。两者的主要区别如下图所示:

XYZ固定欧拉角(RPY) ZYX浮动欧拉角
要确定一个刚体在空间的位姿,须在物体上固连一个坐标系,然后描述该坐标系的原点位置和它三个轴的姿态,总共需要六个自由度或六条信息来完整地定义该物体的位姿。
理解欧拉角时,应该结合两个维度。1)旋转顺序(XYZ、ZYZ等); 2)参考坐标系(固定模式或者浮动模式)
2 欧拉角与四元数的相互转换
因为四元数在插值上存在诸多优势,机器人控制器在对姿态进行计算时,一般先转换成四元数来进行处理。
四元数根据实部和虚部的顺序不同,可以分成两种类型:
- Hamilton顺序:$q=(q_w, q_x, q_y, q_z)$
- JPL顺序:$q=(q_x, q_y, q_z, q_w)$
aubo控制器四元数采用Hamilton顺序。
绕坐标轴的多次旋转可以等效为绕某一转轴旋转一定的角度,四元数和欧拉角之间可以相互转化。
欧拉角转四元数
/**
* @brief RPY欧拉角转四元数
* @param rpy:欧拉角,绕固定坐标系XYZ转动,单位rad
* @param ori:单位四元数,Hamilton顺序
*/
void Rpy2Quat(const double rpy[3], double ori[4])
{
double roll, pitch, yaw, tmp;
roll = rpy[0] / 2.0; //RX
pitch = rpy[1] / 2.0; //RY
yaw = rpy[2] / 2.0; //RZ
ori[0] = cos(roll) * cos(pitch) * cos(yaw) + sin(roll) * sin(pitch) * sin(yaw);
ori[1] = sin(roll) * cos(pitch) * cos(yaw) - cos(roll) * sin(pitch) * sin(yaw);
ori[2] = cos(roll) * sin(pitch) * cos(yaw) + sin(roll) * cos(pitch) * sin(yaw);
ori[3] = cos(roll) * cos(pitch) * sin(yaw) - sin(roll) * sin(pitch) * cos(yaw);
//严格归一化
tmp = sqrt(ori[0] * ori[0] + ori[1] * ori[1] + ori[2] * ori[2] + ori[3] * ori[3]);
ori[0] /= tmp;
ori[1] /= tmp;
ori[2] /= tmp;
ori[3] /= tmp;
}
四元数转欧拉角
/**
* @brief 四元数转RPY欧拉角
* @param ori:单位四元数,Hamilton顺序
* @param rpy:欧拉角,绕固定坐标系XYZ转动,单位rad
*/
void Quat2Rpy(const double ori[4], double rpy[3])
{
//先转换成旋转矩阵
double RotN[3][3];
RotN[0][0] = 2 * (ori[0] * ori[0] + ori[1] * ori[1]) - 1;
RotN[0][1] = 2 * (ori[1] * ori[2] - ori[0] * ori[3]);
RotN[0][2] = 2 * (ori[1] * ori[3] + ori[0] * ori[2]);
RotN[1][0] = 2 * (ori[1] * ori[2] + ori[0] * ori[3]);
RotN[1][1] = 2 * (ori[0] * ori[0] + ori[2] * ori[2]) - 1;
RotN[1][2] = 2 * (ori[2] * ori[3] - ori[0] * ori[1]);
RotN[2][0] = 2 * (ori[1] * ori[3] - ori[0] * ori[2]);
RotN[2][1] = 2 * (ori[2] * ori[3] + ori[0] * ori[1]);
RotN[2][2] = 2 * (ori[0] * ori[0] + ori[3] * ori[3]) - 1;
double eps = 1e-16; //系统精度
// old ZYX order (as per Paul book)
if (fabs(RotN[0][0]) < eps && fabs(RotN[1][0]) < eps)
{
//singularity
rpy[2] = 0.0;
rpy[1] = atan2(-RotN[2][0], RotN[0][0]);
rpy[0] = atan2(-RotN[1][2], RotN[1][1]);
}
else
{
rpy[2] = atan2(RotN[1][0], RotN[0][0]);
rpy[1] = atan2(-RotN[2][0], sqrt(RotN[0][0] * RotN[0][0] + RotN[1][0] * RotN[1][0]));
rpy[0] = atan2(RotN[2][1], RotN[2][2]);
}
}
举例说明

如上图所述,RPY 角分别为 RX = 178.3858, RY = 2.304904, RX = -178.86303:
基于上面规则,姿态变换顺序如下:
- 绕参考坐标系(Base)的 X 轴,旋转178.3858 度,得到姿态1;
- 姿态1绕参考坐标系(Base) Y 轴,旋转2.304904度,得到姿态2
- 姿态2绕参考坐标系(Base) Z 轴,旋转-178.86303 度,得到姿态3
- 姿态3就是目标相对于参考坐标系的姿态。
对应的四元数q 为:
q = [-0.01997, 0.0102021, -0.999647, -0.0142821]
注:q的符号在对姿态进行插值计算时需要进行转换,在静态描述某个姿态时,q与-q没有区别, 表示同一个旋转。
3 常见问题解答
Question1
Question
为什么在机器人示教器中,当Rx、 Ry、 Rz的值不为0的时候,在全局模式下单独手动绕xyz中的一个轴旋转,但是RPY的值都变化?但是当Rx、 Ry、 Rz的值都为0的时候(目标坐标系与参考坐标系姿态相同),点击示教器上旋转姿态的任意一个按钮,点击的这个按钮对应的姿态坐标值变化,其他两个姿态坐标值不变?
Answer
因为 AUBO是采用固定的欧拉角描述方式,旋转矩阵相乘的顺序为 Z -> Y ->X,在全局模式下绕X或y轴旋转,相当于再左乘R(X)或R(Y)的旋转矩阵, Rx、 Ry、 Rz的角度都会变化,绕 z 轴旋转,相当于再左乘R(z)的旋转矩阵, 只会改变 Rz 的角度。
Question2
Question
在设置工具坐标系后,绕工具坐标系 X 轴,Y轴或Z轴 相对偏移一定角度时,其他姿态值为什么有变化?
Answer
因为 AUBO是采用固定的欧拉角描述方式,旋转矩阵相乘的顺序为 Z -> Y ->X,绕工具坐标系旋转时,相当于右乘旋转矩阵
- 绕工具坐标系 X 旋转,旋转矩阵相乘顺序为 Z -> Y ->X -> X,因此理论上只有 Rx 角度发生了变化,
- 绕工具坐标系 Y 旋转,旋转矩阵相乘顺序为 Z -> Y ->X -> Y,理论上 Rx、 Ry、 Rz的角度都会变化
- 绕工具坐标系 Z 旋转,旋转矩阵相乘顺序为 Z -> Y ->X -> Z,理论上 Rx、 Ry、 Rz的角度都会变化
由于工具坐标系的标定误差,以及姿态精度误差,由第三方测量仪检测时,理论上不会发生变化的值,实际上会有微小的变化。
4 相关参考
姿态描述方式参考2.3.机器人姿态描述简介
欧拉角的更多信息可以参考wikipedia: Euler_angles
- 四元数与三维旋转的关系可以参考这里